- The integral
- Winding paths, up and down hills
- Going great lengths on Earth
- Measuring great lengths on Earth
Road trip!
Well, honestly, you’re not exactly the biggest fan of the road part, especially not as a passenger. Choosing not to partake in the off-tune, off-rhythm “car-aoke,” you tune in to your music player and try to find some way to entertain yourself. With all the visual stimuli at your disposal, you find your eyes focusing on the speedometer needle. You’re a long way from home, and—
—wait, how long from home, exactly?
You could probably just check your phone, but it’s not like your exact whereabouts are particularly important. There’s no rush, so why not try to kill some time by figuring this out some other way? You’ve been watching the speedometer for so long, surely that should give enough information to answer your question. So, how do you do it?
Well, suppose the car had been driving at a constant velocity—say, one hundred kilometres per hour due east—then as long as you knew how long you have been on the road, you can figure out how much ground you have covered. For instance, if you were on the road for an hour at one hundred kilometres per hour due east, then you have travelled one hundred kilometres east. After two hours, you would have travelled two hundred kilometres east. After only half an hour, you would have only travelled fifty kilometres east. The “formula” you use to determine this is the definition of velocity rewritten:

In fancier (i.e., mathematical and physical) notation, this would be written as

Of course, the car was not driving at a constant velocity… in fact, the velocity seemed to always be changing. How do you account for a continuously changing velocity? Although the car’s velocity is never constant, it doesn’t seem to be changing too drastically. Therefore, you get the idea: sample the velocity every 
More precisely, if you sample at time 


Sampling at times 

Adding up many terms that “look similar” happens a lot in mathematics, so we usually shorten the above sum using “Sigma notation:”

The notation 




You can visualise this calculation: if you plot the velocity of the car over time, and then sample every 
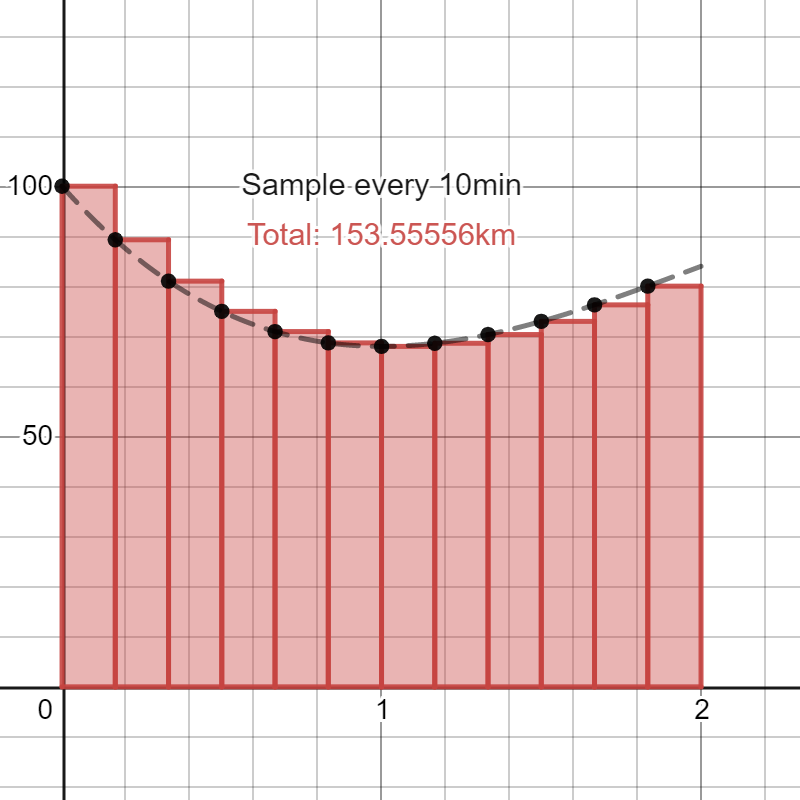
As you can see, the red region is approximately the area under the curve. Thinking back to when you were computing the instantaneous velocity of the falling apple, you figure that your approximation of the total distance covered would get better if you sample more frequently (that is, if you take






(You can experiment with this yourself on Desmos.) Because the approximation keeps approaching the true total distance covered, you realise that the total distance covered is the limit of these approximations as you take 

(Working this out for the velocity function in the above picture, you get that the distance travelled is exactly 152km.) Even though you’ve figured out how to solve the problem you gave yourself, there’s still plenty of road left, so you let your mind continue off this tangent.
The integral
If you replace 






To summarise: for a (uniformly continuous) function

This notation kind of hides 




where the summation reads as “sum over values of 





Likewise, when 

This is called the integral of ![[a,b]](https://s0.wp.com/latex.php?latex=%5Ba%2Cb%5D&bg=ffffff&fg=666666&s=0&c=20201002)
*Technical point. Whenever 
While this does give us a precise way of computing the area under a curve, this is quite tedious to do directly… there’s no way you’d determine how far you travelled by integrating your velocity over the time travelled! If you wanted to determine how far you travelled from time 



… So would we able to do a similar thing for other functions? We have two ways of computing how far we travelled: on one hand, we could take the velocity over time and integrate; on the other hand, we can just take the difference of positions (way easier). If they’re both done correctly, then they have to agree, so this gives us a formula

To extend this formula to other functions, you need a way of connecting velocity and position. This is when you remember: velocity is the derivative of position with respect to time!

This means that if 

Fundamental Theorem of Calculus. If 

This dramatically simplifies integration from being near impossible to being near impossible only sometimes.
This is all fine and dandy, but then you hear your old physics teacher in your ear: velocity is a vector. Looking out the window, you realise the driver has been taking the scenic route (in the middle of the night)… all of your calculations have been based on just the speed of the car, and so you’ve only figured out how to calculate the total mileage of the vehicle.
So, you redo the entire computation, but this time using a vector-valued function 




Let 

![\displaystyle \mathrm D\vec r(t) = \begin{bmatrix} \frac{\mathrm dx}{\mathrm dt} \\[1ex] \frac{\mathrm dy}{\mathrm dt}\end{bmatrix} = \begin{bmatrix} v_x(t) \\ v_y(t) \end{bmatrix} = \vec v(t)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathrm+D%5Cvec+r%28t%29+%3D+%5Cbegin%7Bbmatrix%7D+%5Cfrac%7B%5Cmathrm+dx%7D%7B%5Cmathrm+dt%7D+%5C%5C%5B1ex%5D+%5Cfrac%7B%5Cmathrm+dy%7D%7B%5Cmathrm+dt%7D%5Cend%7Bbmatrix%7D+%3D+%5Cbegin%7Bbmatrix%7D+v_x%28t%29+%5C%5C+v_y%28t%29+%5Cend%7Bbmatrix%7D+%3D+%5Cvec+v%28t%29&bg=ffffff&fg=666666&s=0&c=20201002)
Therefore, you realise that the Fundamental Theorem of Calculus immediately generalises to higher dimensions:

You now lie back, relieved that you’ve accounted for everything. You can finally rest. You look out and watch the moonlit trees as they march over the gentle hills of their domain—
—hills?
You jolt back awake. This isn’t Saskatchewan! You forgot to account for vertical displacement. First, you shrug: if you just use a 3D velocity vector 
Winding paths, up and down hills
That’s when you notice: the surface of the water in your bottle is always level! This gives you an absolute reference point from which you can determine the slope of the car at any point! You collect your data and record that whenever you are in position 


We know the slope, and we can calculate how far we travelled. What we want to know is our change in height, so rearrange the formula as

In fancier symbols, we can just write this as

where 

Look familiar? This calculation assumes that the slope remains constant throughout the distance 


where 

![t\in[a,b]](https://s0.wp.com/latex.php?latex=t%5Cin%5Ba%2Cb%5D&bg=ffffff&fg=666666&s=0&c=20201002)
Again, to simplify the calculation, pretend that (for a short distance) the car travels in a straight line. If you knew that the car travelled 

Of course, you don’t actually know the car’s eastward and northward displacements at any position directly: you just know the car’s velocity vector. Fortunately, this is all you need: assuming the eastward (resp. northward) velocity of the car remains constant for a short period of time, then the total eastward (resp. northward) displacement is just given by 


Notice that 

If you integrate this quantity over the entire curve 



If we write 

This calculates the total vertical displacement of the car during the road trip, but bells continue to ring in your mind (no, not Christmas bells): if 
Remembering back to computing derivatives of higher-dimensional functions, you remember that directional derivatives can be computed using the gradient 


It’s important that 


Interesting: if you recall, 



If we write out the components of 

![\displaystyle \int_a^b\vec F(\vec r(t))\cdot\mathrm D\vec r(t)\mathrm dt = \int_a^b\left[P(x(t),y(t))\frac{\mathrm dx}{\mathrm dt} + Q(x(t),y(t))\frac{\mathrm dy}{\mathrm dt}\right]\mathrm dt](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_a%5Eb%5Cvec+F%28%5Cvec+r%28t%29%29%5Ccdot%5Cmathrm+D%5Cvec+r%28t%29%5Cmathrm+dt+%3D+%5Cint_a%5Eb%5Cleft%5BP%28x%28t%29%2Cy%28t%29%29%5Cfrac%7B%5Cmathrm+dx%7D%7B%5Cmathrm+dt%7D+%2B+Q%28x%28t%29%2Cy%28t%29%29%5Cfrac%7B%5Cmathrm+dy%7D%7B%5Cmathrm+dt%7D%5Cright%5D%5Cmathrm+dt&bg=ffffff&fg=666666&s=0&c=20201002)
By “cancelling out” the 

but I digress. In any case, because the total vertical displacement can be computed most simply as the difference 
Fundamental Theorem of Calculus for line integrals. If 



![\vec r:[a,b]\to\mathbb{R}^n](https://s0.wp.com/latex.php?latex=%5Cvec+r%3A%5Ba%2Cb%5D%5Cto%5Cmathbb%7BR%7D%5En&bg=eeeeee&fg=666666&s=0&c=20201002)

Victory! Even you have to admit you’ve done an impressive amount of impromptu mathematics thus far. Surely you must be coming close to your travel destination by now.
Don’t call your driver Shirley: to your surprise, there is still quite a ways to go. “Unbelievable,” you think. “With how much time has passed, we must have travelled halfway around the world by now!” Your exasperation comes to an abrupt halt: around the world? Egad; you haven’t accounted for the curvature of the Earth.
Going great lengths on Earth
Fortunately, you already have the groundwork necessary for talking about calculus on Earth: smooth manifolds. For simplicity, you model the Earth with the standard 2-sphere

Of course, this is just a model. You know there are mountains and valleys on Earth, but you’ll deal with that issue later; the more pressing issue is how to make sure that you track distances on the sphere appropriately. Given two points on a 2-sphere, how do you determine their distance?
At face value, you could just embed the sphere into three-dimensional space and then measure the points’ Euclidean distance, but this measures the length of the straight line between the points. Given what you’re trying to do (measure mileage of the car on Earth), this isn’t a particularly useful notion of distance. A more relevant measurement is the length of arcs on Earth between the points, rather than straight lines. If you wanted to get the distance between points from the perspective of someone living on the 2-sphere, you could then just measure the smallest such length (which in this case would be the length of the geodesic connecting the two points).
Again, you could just embed the 2-sphere into three-dimensional (Euclidean) space and then measure the length of any arc through this embedding, but this is more of an extrinsic definition of arclength and could very well depend on how you embed the 2-sphere into Euclidean space, so it’s not an entirely satisfactory answer. Is there a way to measure these arclengths without an embedding?
To help answer this question, you revisit your formula for arclength in Euclidean space. If ![\vec r:[a,b]\to\mathbb{R}^n](https://s0.wp.com/latex.php?latex=%5Cvec+r%3A%5Ba%2Cb%5D%5Cto%5Cmathbb%7BR%7D%5En&bg=ffffff&fg=666666&s=0&c=20201002)

In English, the length of the curve is just determined as follows: have a particle travel along the curve and track its speed over time (this is 

![\gamma:[a,b]\to M](https://s0.wp.com/latex.php?latex=%5Cgamma%3A%5Ba%2Cb%5D%5Cto+M&bg=ffffff&fg=666666&s=0&c=20201002)
If you picture 


Since 





The point is that a canonical basis can’t be generally chosen for a manifold in a consistent way (manifolds which admit a basis of its tangent spaces that vary smoothly are called parallelisable). Therefore, to be able to measure arclengths, you need to endow the manifold with additional structure that gives a metric on tangent spaces in a “nice” way. This is done by endowing the manifold 


Formal definition (skippable). A Riemannian 








is a smooth function of 


Given a Riemannian metric, you can then define norms on the tangent spaces in the same way as you would with the dot product in Euclidean space: the norm of a tangent vector 


Once you find an appropriate Riemannian metric on the 2-sphere, this would handle the total distance travelled by the car given that the Earth is perfectly spherical. This is a similar situation as when you forgot to account for hills. To account for mountains and valleys, you need to introduce a height function 

By the same reasoning as in the Euclidean setting, you want to integrate the directional derivative of 


Recall that the derivative of a function of manifolds is given by the Jacobian matrix when written in terms of (partial derivatives of) local coordinates. In particular, 



![\displaystyle \int_C\mathrm dh = \int_{p\in C}\left[\mathrm dh\left(\frac{\mathrm d\gamma}{|\mathrm d\gamma|_p}\right)\right]\mathrm ds = \int_a^b\left[\mathrm dh\left(\frac{\mathrm d\gamma_t}{|\mathrm d\gamma_t|_{\gamma(t)}}\right)|\mathrm d\gamma_t|_{\gamma(t)}\right]\mathrm dt = \int_a^b\big[\mathrm dh(\mathrm d\gamma_t)\big]\mathrm dt](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_C%5Cmathrm+dh+%3D+%5Cint_%7Bp%5Cin+C%7D%5Cleft%5B%5Cmathrm+dh%5Cleft%28%5Cfrac%7B%5Cmathrm+d%5Cgamma%7D%7B%7C%5Cmathrm+d%5Cgamma%7C_p%7D%5Cright%29%5Cright%5D%5Cmathrm+ds+%3D+%5Cint_a%5Eb%5Cleft%5B%5Cmathrm+dh%5Cleft%28%5Cfrac%7B%5Cmathrm+d%5Cgamma_t%7D%7B%7C%5Cmathrm+d%5Cgamma_t%7C_%7B%5Cgamma%28t%29%7D%7D%5Cright%29%7C%5Cmathrm+d%5Cgamma_t%7C_%7B%5Cgamma%28t%29%7D%5Cright%5D%5Cmathrm+dt+%3D+%5Cint_a%5Eb%5Cbig%5B%5Cmathrm+dh%28%5Cmathrm+d%5Cgamma_t%29%5Cbig%5D%5Cmathrm+dt&bg=ffffff&fg=666666&s=0&c=20201002)
In particular, the Riemann metric cancels out! Therefore, although we need a Riemannian metric to integrate with respect to arclength, Riemannian structure is unnecessary for integrating… things that look like
What exactly are such things? In the Euclidean setting, we treated the gradient 


But why would we prefer linear functionals on the tangent space more than actual tangent vectors when integrating? It may not entirely make sense why these are suitable: an integral is fundamentally a formalisation of an “infinite sum of infinitesimal quantities,” so what do linear functionals have to do with infinitesimals? To answer this, let’s try to be more precise about what “infinitesimal changes” should be on a manifold.
There is no one way to go about this, but first we should declare what we intend to measure infinitesimal changes of. This is fairly simple: for our purposes (integration), we’re mostly interested in infinitesimal changes of functions. Note that we’re talking about the infinitesimal changes themselves, rather than the infinitesimal rates of changes (we have already figured out the latter up to the generality of manifolds; in symbols, for a function 


In particular, we’re less concerned with specific functions, and are more focused on their infinitesimal changes. Therefore, we should consider two functions defined around a point 

Germs of functions almost extract the infinitesimal information of a function at a point—they extract the local information of a function. However, since we’re more interested infinitesimal changes of a function, it doesn’t even matter to us what the function is equal to at 

- (quotient) we can declare that two functions
are “the same” if their difference
is equal to a constant function
- (normalise) we can just restrict our attention to just those functions
where

Choose the latter for simplicity and define

Note that for any function 


Remark (skippable). In fancy jargon, a ring of germs at a point is precisely a stalk of the sheaf of functions on the manifold: if 

The reason we denote the subcollection of (germs of) functions that vanish at 

The space

 [Desmos]
[Desmos]No matter how closely you zoom into the origin, these functions are never equal away from zero, meaning that their germs are different in 



You might notice at this point that although we’ve made a distinction between infinitesimal changes and derivatives, we’re essentially declaring that two functions have the same infinitesimal changes if their derivatives are the same! Therefore, we define 


So what does this have to do with linear functionals on the tangent space? Well, it turns out that there is a natural identification of 
Indeed, the derivative defines a linear map 




showing that their derivatives are linearly independent in 



Summary/Definition. For a smooth 



Remark (skippable). The above work is just the first isomorphism theorem spelled out: using the local coordinate functions, we proved that the derivative map 

Taking one more step, we get a more useful definition of the cotangent space. Given two smooth functions that vanish at zero, their product must have a trivial derivative by the product rule. Therefore, we get an inclusion 



Using this newfound notation, we get a formalisation of the differential of a function discussed back when you studied derivatives. If we fix a local coordinate system 

In particular, if we smoothly vary our choice of 





Remark. We make precise the idea of making choice of cotangent vectors “smooth” by constructing the cotangent bundle 





Analogously, a vector field on 




Suppose we have a Riemannian metric 




![\displaystyle \int_C\omega := \int_{p\in C}\left[\omega\left(\frac{\mathrm d\gamma}{|\mathrm d\gamma|_p}\right)\right]\mathrm ds = \int_a^b\left[\omega\left(\frac{\mathrm d\gamma_t}{|\mathrm d\gamma_t|_{\gamma(t)}}\right)|\mathrm d\gamma_t|_{\gamma(t)}\right]\mathrm dt = \int_a^b\big[\omega(\mathrm d\gamma_t)\big]\mathrm dt](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cint_C%5Comega+%3A%3D+%5Cint_%7Bp%5Cin+C%7D%5Cleft%5B%5Comega%5Cleft%28%5Cfrac%7B%5Cmathrm+d%5Cgamma%7D%7B%7C%5Cmathrm+d%5Cgamma%7C_p%7D%5Cright%29%5Cright%5D%5Cmathrm+ds+%3D+%5Cint_a%5Eb%5Cleft%5B%5Comega%5Cleft%28%5Cfrac%7B%5Cmathrm+d%5Cgamma_t%7D%7B%7C%5Cmathrm+d%5Cgamma_t%7C_%7B%5Cgamma%28t%29%7D%7D%5Cright%29%7C%5Cmathrm+d%5Cgamma_t%7C_%7B%5Cgamma%28t%29%7D%5Cright%5D%5Cmathrm+dt+%3D+%5Cint_a%5Eb%5Cbig%5B%5Comega%28%5Cmathrm+d%5Cgamma_t%29%5Cbig%5D%5Cmathrm+dt&bg=ffffff&fg=666666&s=0&c=20201002)
Once again, the final formula is left independent of the metric! Therefore, we can define the integral of a differential 1-form over curves on arbitrary* manifolds this way.
*Technical remark. In general, integration of forms requires first fixing an orientation of the manifold. This is implicit in the above formula, because it assumes that the curve ![\gamma:[a,b]\to M](https://s0.wp.com/latex.php?latex=%5Cgamma%3A%5Ba%2Cb%5D%5Cto+M&bg=eeeeee&fg=666666&s=0&c=20201002)


It may have been so long that the original goal has been forgotten, but remember: all this was to understand how to integrate the derivative of a height function 
Generalised Stokes’ Theorem in one dimension. If 


which further generalises the “fundamental theorems” of calculus established much earlier.
This would have been a good place to end things, but we haven’t yet established a Riemannian metric on the 2-sphere, so we can’t yet compute the actual arclength of the journey
Measuring great lengths on Earth
First, the notation 


Let’s be more explicit about this. If we fix a local coordinate system 

where 


For instance, the usual Euclidean metric on 


Remark (skippable). This perspective also allows us to be more precise about how a Riemannian metric varies smoothly: the Riemannian metric must in particular be a smooth section of the tensor product bundle 



Now for the sake of completeness, let’s derive a metric tensor 

where 



In general, pulling back a metric 





where 
In our case, the off-diagonal components of the Euclidean metric tensor are zero, so the above expressio simplifies to 
- similarly




Therefore, the Riemannian metric on the 2-sphere we get as a result is
![\mathrm ds^2 = R^2\Big[\mathrm d\theta_1^2 + \sin^2\theta_1\mathrm d\theta_2^2\Big]](https://s0.wp.com/latex.php?latex=%5Cmathrm+ds%5E2+%3D+R%5E2%5CBig%5B%5Cmathrm+d%5Ctheta_1%5E2+%2B+%5Csin%5E2%5Ctheta_1%5Cmathrm+d%5Ctheta_2%5E2%5CBig%5D&bg=ffffff&fg=666666&s=0&c=20201002)
At last, you feel the car come to a stop, and your mates all cheer. You’ve arrived at your destination, and right on time for you to wrap up this train of thought! While not the most impactful way to finish the thought, you don’t mind because you know nobody else will follow your thoughts far enough to notice.

One thought on “How far along the tangent have we gone?”